



1. ປຸ່ມ Lock / ປຸ່ມ Power ( ) .Short ກົດເພື່ອລັອກປຸ່ມ, ແລະຫຼັງຈາກນັ້ນກົດປຸ່ມສັ້ນເພື່ອປົດລັອກ. ກົດປຸ່ມຍາວສໍາລັບ 2 ວິນາທີເພື່ອເປີດ / ປິດ.
) .Short ກົດເພື່ອລັອກປຸ່ມ, ແລະຫຼັງຈາກນັ້ນກົດປຸ່ມສັ້ນເພື່ອປົດລັອກ. ກົດປຸ່ມຍາວສໍາລັບ 2 ວິນາທີເພື່ອເປີດ / ປິດ.
2. ຊ່ອງປ່ຽນ / ກະລຸນາໃສ່ປຸ່ມສໍາລັບ ), ຫນັງສືພິມສັ້ນເພື່ອເລືອກຊ່ອງທາງຫມາ. ກົດຍາວເປັນເວລາ 3 ວິນາທີເພື່ອເຂົ້າສູ່ໂຫມດການຈັບຄູ່.
), ຫນັງສືພິມສັ້ນເພື່ອເລືອກຊ່ອງທາງຫມາ. ກົດຍາວເປັນເວລາ 3 ວິນາທີເພື່ອເຂົ້າສູ່ໂຫມດການຈັບຄູ່.
3. ປຸ່ມຮົ້ວໄຮ້ສາຍ ( ): ກົດປຸ່ມສັ້ນເພື່ອເຂົ້າ / ອອກຈາກຮົ້ວເອເລັກໂຕຣນິກ. ຫມາຍເຫດ: ນີ້ແມ່ນຫນ້າທີ່ສະເພາະສໍາລັບ X3, ບໍ່ມີຢູ່ໃນ x1 / x2.
): ກົດປຸ່ມສັ້ນເພື່ອເຂົ້າ / ອອກຈາກຮົ້ວເອເລັກໂຕຣນິກ. ຫມາຍເຫດ: ນີ້ແມ່ນຫນ້າທີ່ສະເພາະສໍາລັບ X3, ບໍ່ມີຢູ່ໃນ x1 / x2.
4. ປຸ່ມຫຼຸດລົງໃນລະດັບການສັ່ນສະເທືອນ :( )
)
5. ປຸ່ມ Vibration / ອອກຈາກປຸ່ມ Piring Mode: ( ) ຫນັງສືກົດປຸ່ມສັ້ນເພື່ອສັ່ນສະເທືອນເທື່ອ, ກົດໄລ້ກົດດັນໃຫ້ມີຄວາມສັ່ນສະເທືອນ 8 ຄັ້ງແລະຢຸດ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ໃຫ້ກົດປຸ່ມນີ້ເພື່ອອອກເດີນທາງ.
) ຫນັງສືກົດປຸ່ມສັ້ນເພື່ອສັ່ນສະເທືອນເທື່ອ, ກົດໄລ້ກົດດັນໃຫ້ມີຄວາມສັ່ນສະເທືອນ 8 ຄັ້ງແລະຢຸດ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ໃຫ້ກົດປຸ່ມນີ້ເພື່ອອອກເດີນທາງ.
.. Shock / Delete BUTBERS ): ຂ່າວສັ້ນເພື່ອໃຫ້ອາການຊ shock ອກ 1 ວິນາທີ, ຂ່າວຍາວສໍາລັບການໃຫ້ອາການຊ shock ອກ 8 ວິນາທີແລະຢຸດ. ປ່ອຍແລະກົດອີກຄັ້ງເພື່ອກະຕຸ້ນອາການຊ shock ອກ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ເລືອກເຄື່ອງຮັບເພື່ອລຶບການຈັບຄູ່ແລະກົດປຸ່ມນີ້ເພື່ອລຶບ.
): ຂ່າວສັ້ນເພື່ອໃຫ້ອາການຊ shock ອກ 1 ວິນາທີ, ຂ່າວຍາວສໍາລັບການໃຫ້ອາການຊ shock ອກ 8 ວິນາທີແລະຢຸດ. ປ່ອຍແລະກົດອີກຄັ້ງເພື່ອກະຕຸ້ນອາການຊ shock ອກ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ເລືອກເຄື່ອງຮັບເພື່ອລຶບການຈັບຄູ່ແລະກົດປຸ່ມນີ້ເພື່ອລຶບ.
7. ປຸ່ມໄຟ ( )
)
8. ປຸ່ມທີ່ມີອາການຊ shock ອກ / ເອເລັກໂຕຣນິກເພີ່ມຂື້ນ (▲).
9. ປຸ່ມຢືນຢັນສຽງປິບ / ຄູ່ ( ): ຫນັງສືພິມສັ້ນເພື່ອສົ່ງສຽງສຽງສຽງ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ເລືອກຊ່ອງທາງຫມາແລະກົດປຸ່ມນີ້ເພື່ອຢືນຢັນການຈັບຄູ່.
): ຫນັງສືພິມສັ້ນເພື່ອສົ່ງສຽງສຽງສຽງ. ໃນລະຫວ່າງໂຫມດການຈັບຄູ່, ເລືອກຊ່ອງທາງຫມາແລະກົດປຸ່ມນີ້ເພື່ອຢືນຢັນການຈັບຄູ່.
10. ສໍາລັບລະດັບການສັ່ນສະເທືອນເພີ່ມຂື້ນ. ( )
)
.. ລະດັບລະດັບຄວາມຊ shock ອກ / ລະດັບໄຟຟ້າໃນລະດັບສູງ. ( )
)

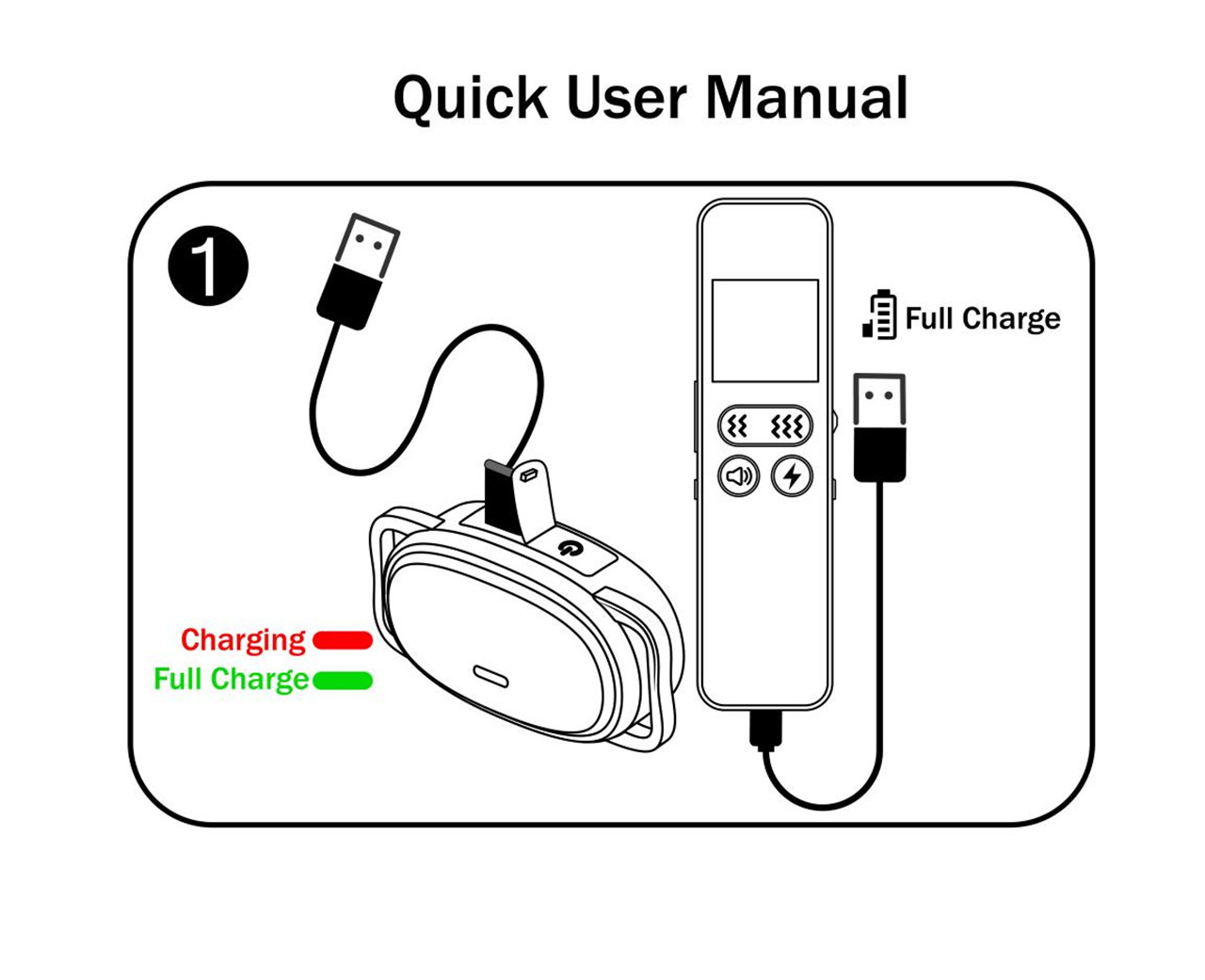
1.ສາກໄຟ
1.1 ໃຊ້ສາຍ USB ລວມທັງສາກທີ່ໃຊ້ຄໍແລະຄວບຄຸມໄລຍະໄກໃນເວລາ 5V.
1.2 ເມື່ອການຄວບຄຸມໄລຍະໄກຖືກຄິດຄ່າທໍານຽມເຕັມ, ການສະແດງແບັດເຕີຣີເຕັມ.
1.3 ໃນເວລາທີ່ຄໍໄດ້ຖືກກ່າວຫາເຕັມ, ແສງສີແດງກາຍເປັນສີຂຽວ. ມັນຄິດຄ່າບໍລິການຢ່າງເຕັມສ່ວນໃນປະມານສອງຊົ່ວໂມງ.
1.4 ລະດັບແບັດເຕີຣີຖືກສະແດງຢູ່ຫນ້າຈໍຄວບຄຸມທີ່ຫ່າງໄກສອກຫຼີກ. ຄວາມອາດສາມາດຄວບຄຸມທີ່ຫ່າງໄກສອກຫຼີກ. ຄໍ 3 ຈະຖືກສະແດງ.
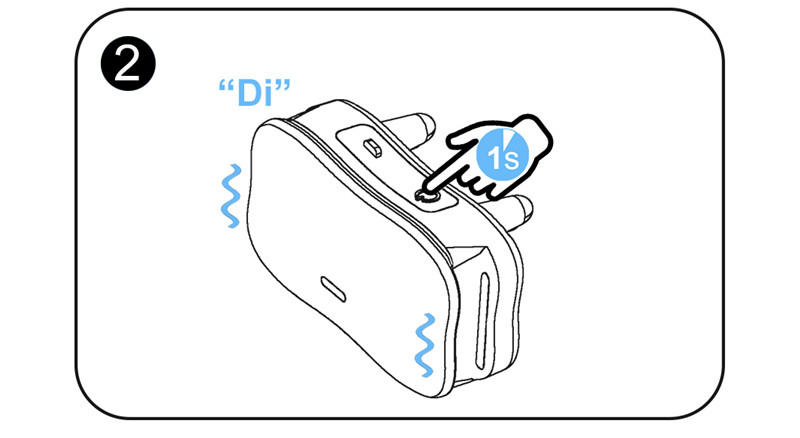
2.Cກະຮອກon / off
2.1 ຂ່າວສັ້ນກົດປຸ່ມພະລັງງານ () ເປັນເວລາ 1 ວິນາທີ, ຄໍຈະເປັນສຽງຮ້ອງແລະສັ່ນສະເທືອນເພື່ອເປີດໃຊ້ງານ.
2.2 ຫຼັງຈາກທີ່ມັນໃຊ້ໃນເວລາທີ່ແສງສີຂຽວກະພິບຄັ້ງຫນຶ່ງສໍາລັບ 2 ວິນາທີ, ໃຫ້ເຂົ້າໄປໃນສະພາບການນອນຫຼັບໂດຍອັດຕະໂນມັດຖ້າມີແສງສະຫວ່າງສີຂຽວໂດຍອັດຕະໂນມັດເປັນເວລາ 6 ວິນາທີ.
2.3 ກົດແລະຖືເປັນເວລາ 2 ວິນາທີເພື່ອປິດໄຟ.
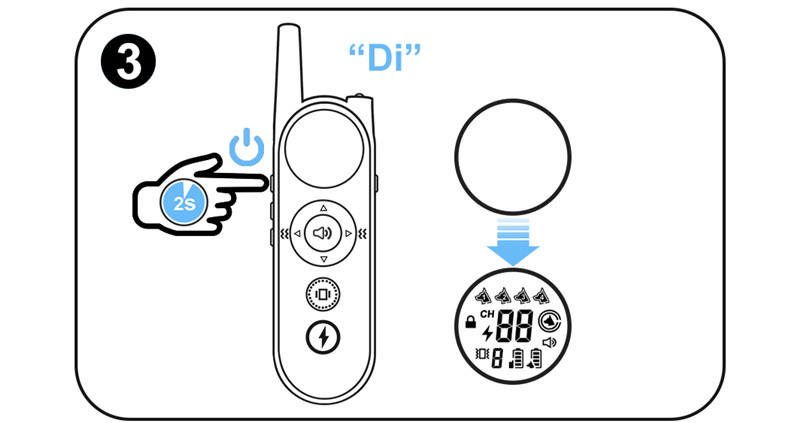
3.ຄວບຄຸມໄລຍະໄກເປີດ / ປິດ
ປຸ່ມຍາວ 3.1 ກົດປຸ່ມ () ເປັນເວລາ 2 ວິນາທີເພື່ອເປີດ / ປິດ. ມັນຈະມີສຽງປິບແລະຫນ້າຈໍຈະເຮັດໃຫ້ມີແສງສະຫວ່າງ.
3.2 ກົດປຸ່ມຍາວ 12 ປຸ່ມ () ເປັນເວລາ 2 ວິນາທີ, beep ຈະໄດ້ຍິນແລະຈໍສະແດງຜົນຈະປິດ.
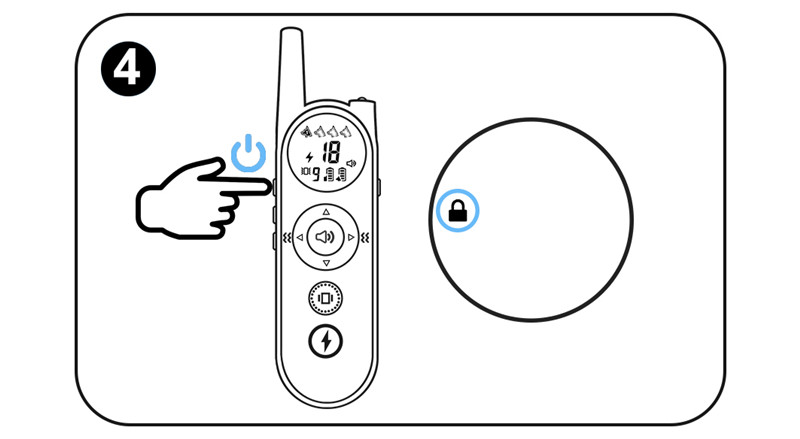
4.ຄີບອດ
4.1 ກົດປຸ່ມສັ້ນເພື່ອລັອກປຸ່ມ (), ແລະຫຼັງຈາກນັ້ນກົດປຸ່ມສັ້ນເພື່ອປົດລັອກ.
4.2 ແນະນໍາໃຫ້ລັອກປຸ່ມເມື່ອບໍ່ໃຊ້ເພື່ອປ້ອງກັນການໃຊ້ໃນທາງທີ່ຜິດ.
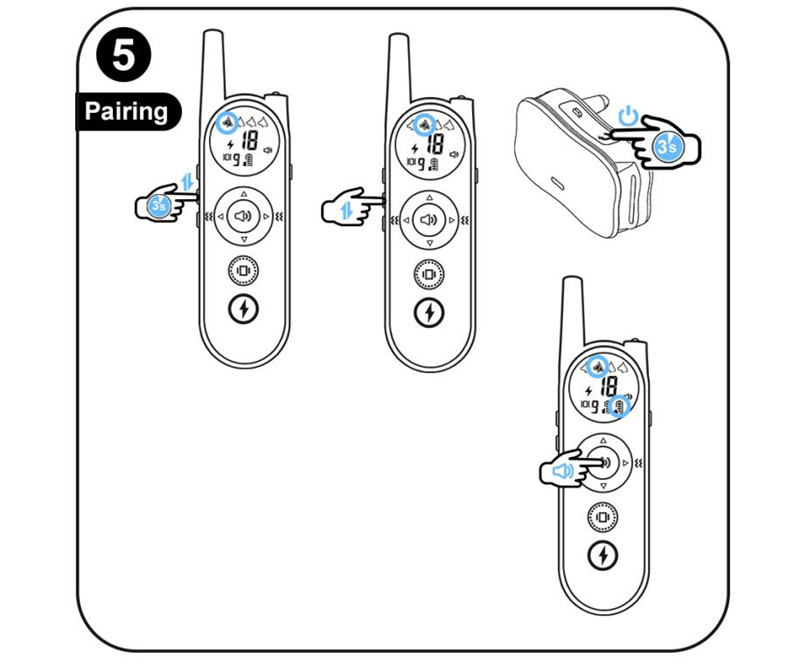
5.ເຊີດ(ຫນຶ່ງຕໍ່ຫນຶ່ງໄດ້ຖືກຈັບຄູ່ຢູ່ໃນໂຮງງານ, ທ່ານສາມາດໃຊ້ມັນໂດຍກົງ)
5.1 ໃນລັດທີ່ມີອໍານາດໃນການຄວບຄຸມຂອງທ່ານ, ກົດໄລຍະຍາວກົດປຸ່ມປ່ຽນຊ່ອງທາງ () ເປັນເວລາ 3 ວິນາທີຈົນກ່ວາໄອຄອນເລີ່ມຕົ້ນກະພິບ, ແລະຕົວຄວບຄຸມໄລຍະໄກເຂົ້າສູ່ໂຫມດຈັບຄູ່.
5.2 ຫຼັງຈາກນັ້ນ, ກົດປຸ່ມສັ້ນນີ້ () ເພື່ອເລືອກເຄື່ອງຮັບທີ່ທ່ານຕ້ອງການຈັບຄູ່ກັບ (ຮູບສັນຍາລັກກະພິບສະແດງໃຫ້ເຫັນວ່າມັນຢູ່ໃນຮູບແບບການຈັບຄູ່). ດໍາເນີນການທີ່ຈະຕັ້ງຄ່າຜູ້ຮັບ.
5.3 ເພື່ອເອົາເຄື່ອງຮັບທີ່ເປັນຄູ່ໃນຂະນະທີ່ມັນໃຊ້ເວລາອອກ, ກົດປຸ່ມພະລັງງານເປັນເວລາ 3 ວິນາທີຈົນກ່ວາທ່ານຈະເຫັນແສງສະຫວ່າງສີແດງແລະສີຂຽວ. ປ່ອຍປຸ່ມ, ແລະຜູ້ຮັບຈະເຂົ້າສູ່ໂຫມດທີ່ເປັນເງົາ. ຫມາຍເຫດ: ຮູບແບບການຈັບຄູ່ຂອງຜູ້ຮັບແມ່ນມີການເຄື່ອນໄຫວເປັນເວລາ 30 ວິນາທີ; ຖ້າເວລາເກີນໄປ, ທ່ານຈໍາເປັນຕ້ອງພະລັງງານປິດແລະລອງໃຫມ່.
5.4 ກົດປຸ່ມຄໍາສັ່ງທີ່ຢູ່ໃນຕົວຄວບຄຸມໄລຍະໄກ () ເພື່ອຢືນຢັນການຈັບຄູ່. ມັນຈະປ່ອຍສຽງສຽງໃຫ້ສຽງດັງເພື່ອສະແດງເຖິງການຈັບຄູ່ທີ່ປະສົບຜົນສໍາເລັດ.
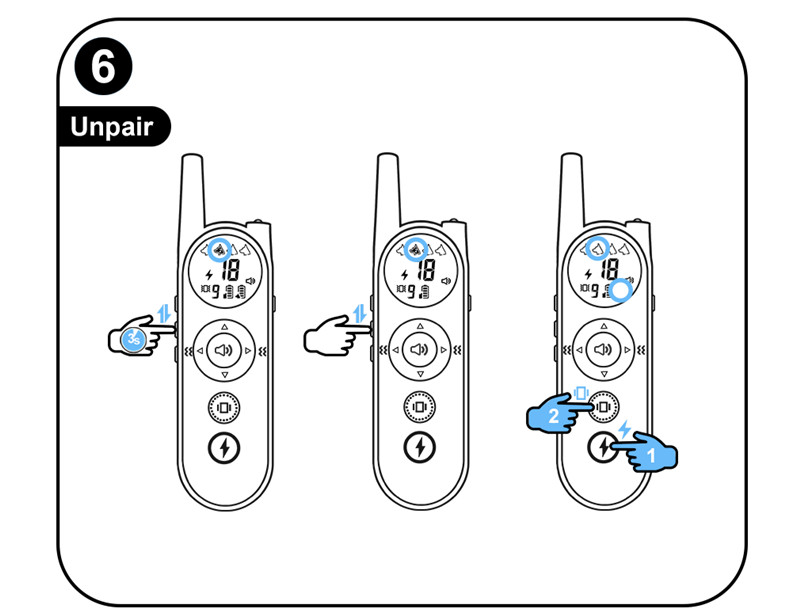
6. ຍົກເລີກການຈັບຄູ່
6.1 ກົດປຸ່ມ SWITE SKTONS ປຸ່ມປ່ຽນຊ່ອງທາງ ( ) ຢູ່ໃນຕົວຄວບຄຸມໄລຍະໄກເປັນເວລາ 3 ວິນາທີຈົນກ່ວາໄອຄອນເລີ່ມກະພິບ. ຫຼັງຈາກນັ້ນ, ສັ້ນກົດປຸ່ມປ່ຽນ () ເພື່ອເລືອກເຄື່ອງຮັບທີ່ທ່ານຕ້ອງການຍົກເລີກການຈັບຄູ່ກັບ.
) ຢູ່ໃນຕົວຄວບຄຸມໄລຍະໄກເປັນເວລາ 3 ວິນາທີຈົນກ່ວາໄອຄອນເລີ່ມກະພິບ. ຫຼັງຈາກນັ້ນ, ສັ້ນກົດປຸ່ມປ່ຽນ () ເພື່ອເລືອກເຄື່ອງຮັບທີ່ທ່ານຕ້ອງການຍົກເລີກການຈັບຄູ່ກັບ.
6.2 ກົດປຸ່ມສັ້ນປຸ່ມຊ shock ອກ () ເພື່ອລຶບການຈັບຄູ່, ແລະຫຼັງຈາກນັ້ນກົດປຸ່ມ vibration () ເພື່ອອອກຈາກຮູບແບບການຈັບຄູ່.
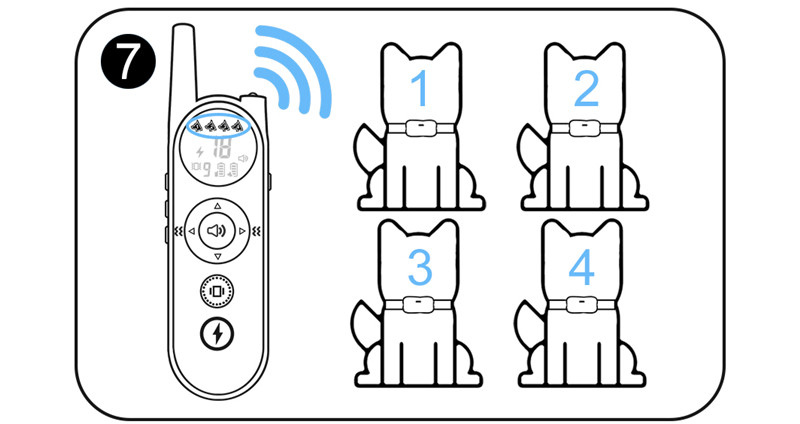
7.ຈັບຄູ່ກັບຫຼາຍຄໍs
ເຮັດຊ້ໍາອີກຄັ້ງຫນຶ່ງການດໍາເນີນງານຂ້າງເທິງ, ທ່ານສາມາດສືບຕໍ່ຈັບຄູ່ຄໍອື່ນໆ.
7.1 ຫນຶ່ງຊ່ອງທາງມີຄໍຫນຶ່ງ, ແລະມີຄໍຫຼາຍຄໍບໍ່ສາມາດເຊື່ອມຕໍ່ກັບຊ່ອງທາງດຽວກັນ.
7.2 ຫຼັງຈາກທັງສີ່ຊ່ອງທັງຫມົດແມ່ນຈັບຄູ່, ທ່ານສາມາດກົດປຸ່ມປ່ຽນຊ່ອງທາງ () ເພື່ອເລືອກ 1 ຫາ 4 ຊ່ອງທາງເພື່ອຄວບຄຸມຄໍດຽວ, ຫລືຄວບຄຸມຄໍທັງຫມົດໃນເວລາດຽວກັນ.
ລະດັບການສັ່ນສະເທືອນ 7.3 ສາມາດປັບໄດ້ເປັນສ່ວນບຸກຄົນໃນເວລາຄວບຄຸມຫນ້າທີ່ຄໍດຽວ.
7.4 ຫມາຍເຫດພິເສດ: ໃນເວລາຄວບຄຸມຄໍຫຼາຍໃນເວລາດຽວກັນ, ລະດັບການສັ່ນສະເທືອນຄືກັນ, ແລະຮູບແບບການເຮັດວຽກຂອງ X1 / x2).
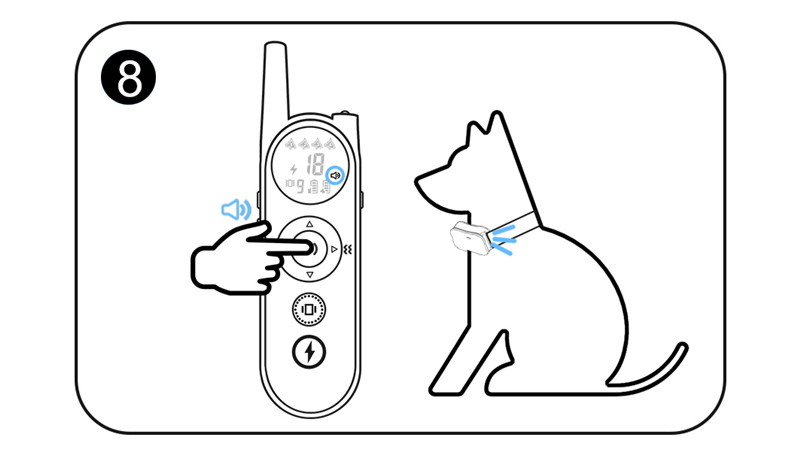
8.ສຽງປິບສຽງ
8.1 ກົດປຸ່ມສັ້ນ () ປຸ່ມຢູ່ໃນຕົວຄວບຄຸມໄລຍະໄກ, ແລະຜູ້ຮັບຈະປ່ອຍສຽງສຽງປິບ.
8.2 ຄໍາແນະນໍາຍາວ () ປຸ່ມ, ແລະຜູ້ຮັບຈະປ່ອຍສຽງໃຫ້ສຽງຢ່າງຕໍ່ເນື່ອງ.
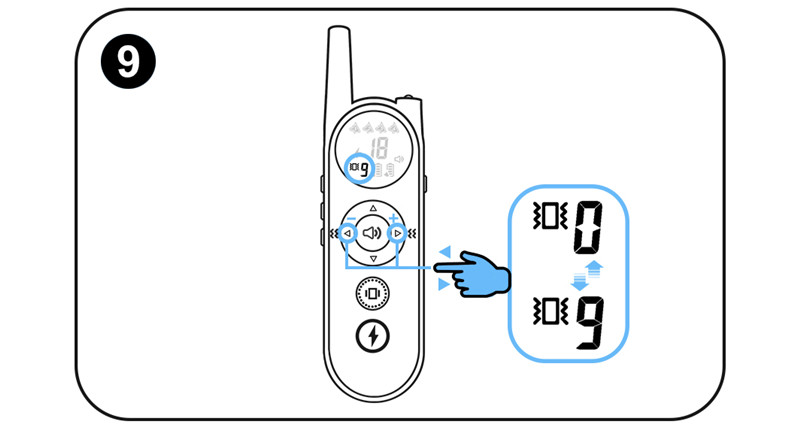
9.ການປັບຄວາມຮຸນແຮງຂອງ Vibration
9.1 ກົດປຸ່ມ VIBRIRATE SERTINE STERFLE (), ແລະລະດັບການສັ່ນສະເທືອນຈະຫຼຸດລົງຈາກລະດັບ 9 ເຖິງລະດັບ 0.
9.2 ກົດປຸ່ມ Vibration Service Upduing (), ແລະລະດັບການສັ່ນສະເທືອນຈະເພີ່ມຂື້ນຈາກລະດັບ 0 ເຖິງລະດັບ 9.
9.3 ລະດັບ 0 ຫມາຍຄວາມວ່າບໍ່ມີການສັ່ນສະເທືອນ, ແລະລະດັບ 9 ແມ່ນການສັ່ນສະເທືອນທີ່ແຂງແຮງທີ່ສຸດ.
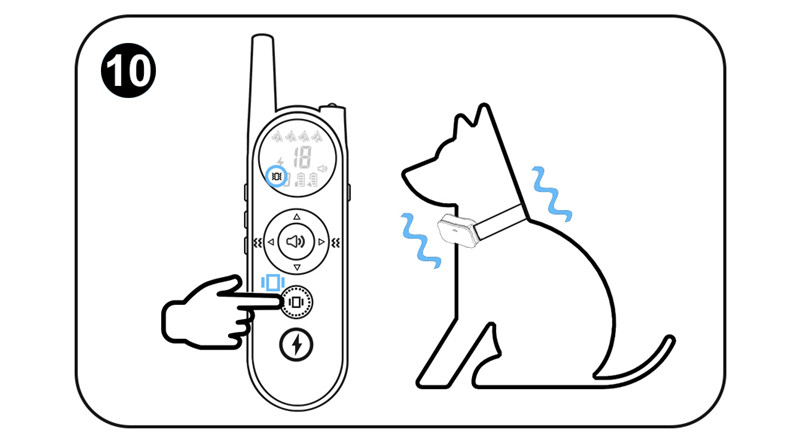
10.ຄໍາສັ່ງສັ່ນສະເທືອນ
10.1 ກົດປຸ່ມສັ້ນປຸ່ມ Vibration () ແລະຄໍຈະສັ່ນສະເທືອນເທື່ອ.
10.2 ກົດປຸ່ມ Vibration ຍາວ (), ຄໍຈະສັ່ນສະເທືອນຢ່າງຕໍ່ເນື່ອງແລະຈະຢຸດເຊົາພາຍຫຼັງ 8 ວິນາທີ.
10.3 ໃນເວລາຄວບຄຸມຄໍຫຼາຍໃນເວລາດຽວກັນ, ລະດັບການສັ່ນສະເທືອນແມ່ນມູນຄ່າທີ່ກໍານົດໄວ້ໃນປະຈຸບັນ.
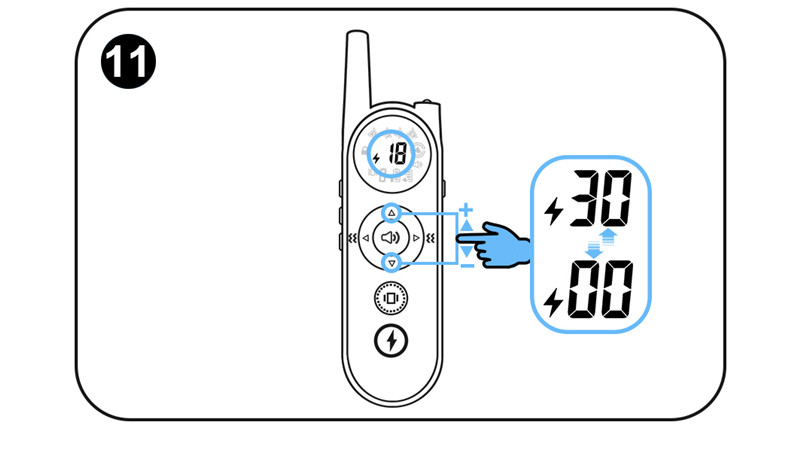
.ການປັບຄວາມເຂັ້ມຂົ້ນຂອງຄວາມສົນໃຈ
11.1 ກົດປຸ່ມເພີ່ມຂື້ນຂອງລະດັບຊ shock ອກ (▲) ຢູ່ໃນຕົວຄວບຄຸມໄລຍະໄກ, ແລະລະດັບຊ shock ອກຈະເພີ່ມຂື້ນຈາກລະດັບ 0 ເຖິງລະດັບ 30.
11.2 ກົດປຸ່ມຫຼຸດລົງລະດັບຊ shock ອກ () ຢູ່ໃນຕົວຄວບຄຸມຫ່າງໄກສອກຫຼີກ, ແລະລະດັບຊ shock ອກຈະຫຼຸດລົງຈາກລະດັບ 30 ເຖິງລະດັບ 0.
11.3 ລະດັບ 0 ຫມາຍຄວາມວ່າບໍ່ມີອາການຊ shock ອກ, ແລະລະດັບ 30 ແມ່ນອາການຊ shock ອກທີ່ແຂງແຮງທີ່ສຸດ
11.4 ມັນໄດ້ຖືກແນະນໍາໃຫ້ເລີ່ມຝຶກອົບຮົມຫມາຢູ່ໃນລະດັບ 1 ແລະສັງເກດເບິ່ງປະຕິກິລິຍາຂອງຫມາກ່ອນທີ່ຈະເພີ່ມຄວາມເຂັ້ມ.
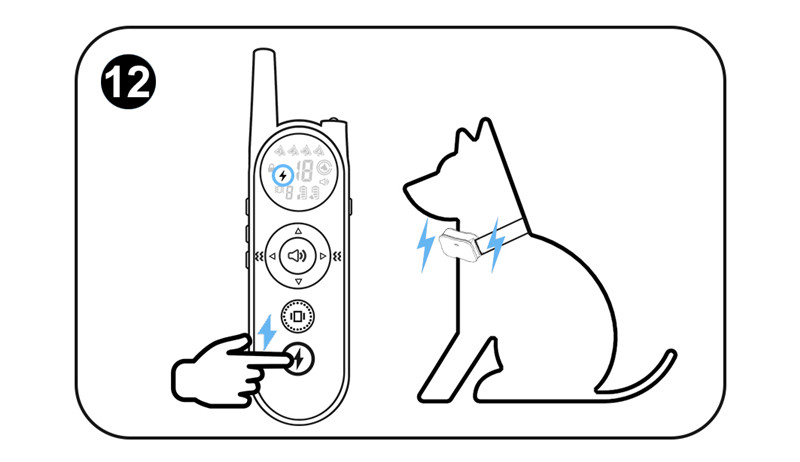
.ຄໍາສັ່ງຊ shock ອກ
12.1 ກົດປຸ່ມສັ້ນປຸ່ມໄຟຟ້າ () ແລະມັນຈະມີຄວາມຊ shock ອກໄຟຟ້າເປັນຫນຶ່ງວິນາທີ.
12.2 ກົດປຸ່ມໄຟຟ້າຍາວ () ແລະຄວາມຊ shock ອກໄຟຟ້າຈະຢຸດຫຼັງຈາກ 8 ວິນາທີ.
12.3 ປ່ອຍປຸ່ມຊ shock ອກແລະກົດປຸ່ມຊ shock ອກອີກຄັ້ງເພື່ອກະຕຸ້ນອາການຊ shock ອກ.
13. Eຫນ້າທີ່ຮົ້ວ LectRonic (X3 ແບບເທົ່ານັ້ນ).
ມັນຊ່ວຍໃຫ້ທ່ານສາມາດກໍານົດຂອບເຂດຈໍາກັດທາງໄກສໍາລັບຫມາຂອງທ່ານທີ່ຈະເປັນອິດສະຫຼະແລະໃຫ້ຄໍາເຕືອນໂດຍອັດຕະໂນມັດຖ້າຫມາຂອງທ່ານເກີນຂີດຈໍາກັດນີ້. ນີ້ແມ່ນຄໍາແນະນໍາກ່ຽວກັບວິທີໃຊ້ຟັງຊັນນີ້:
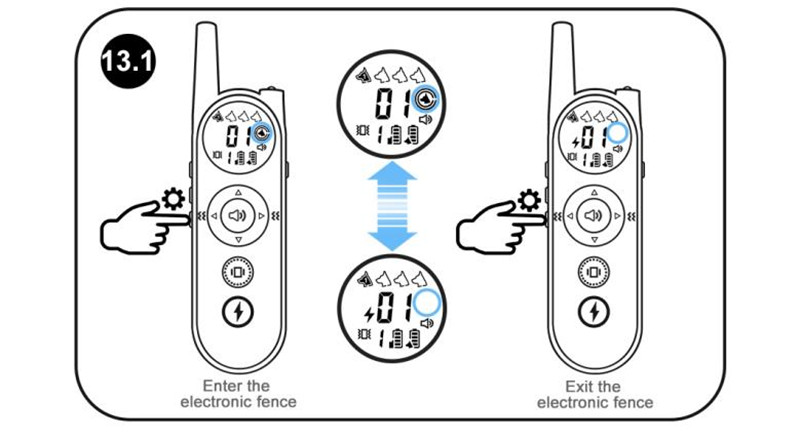
13.1 ເພື່ອປ້ອນຮູບແບບຮົ້ວເອເລັກໂຕຣນິກ: ກົດປຸ່ມເລືອກຫນ້າທີ່ (). ຮູບສັນຍາລັກຂອງຮົ້ວເອເລັກໂຕຣນິກຈະຖືກສະແດງ ( ).
).
13.2 ເພື່ອອອກຈາກຮູບແບບຮົ້ວເອເລັກໂຕຣນິກ: ກົດປຸ່ມເລືອກຫນ້າທີ່ເຮັດຫນ້າທີ່ () ອີກເທື່ອຫນຶ່ງ. ຮູບສັນຍາລັກຮົ້ວເອເລັກໂຕຣນິກຈະຫາຍໄປ ().
ຄໍາແນະນໍາ: ເມື່ອບໍ່ໃຊ້ຫນ້າທີ່ກ່ຽວກັບຮົ້ວອີເລັກໂທຣນິກ, ແນະນໍາໃຫ້ອອກຈາກຫນ້າທີ່ຮົ້ວຂອງເອເລັກໂຕຣນິກເພື່ອປະຫຍັດພະລັງງານ.
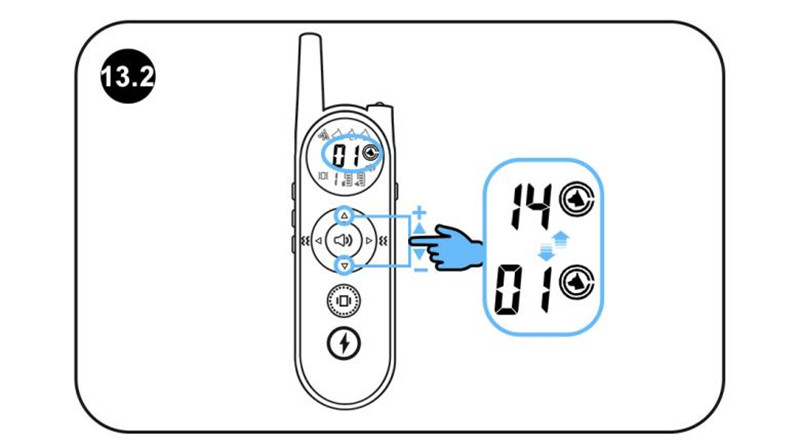
13.2.ປັບໄລຍະທາງລະດັບ:
ເພື່ອປັບໄລຍະຫ່າງຮົ້ວເອເລັກໂຕຣນິກ: ໃນຂະນະທີ່ຢູ່ໃນຮູບແບບຮົ້ວອີເລັກໂທຣນິກ, ກົດປຸ່ມ (ປຸ່ມ). ລະດັບຮົ້ວເອເລັກໂຕຣນິກຈະເພີ່ມຂື້ນຈາກລະດັບ 1 ເຖິງລະດັບ 14. ກົດປຸ່ມ () ປຸ່ມເພື່ອຫຼຸດລົງລະດັບຮົ້ວເອເລັກໂຕຣນິກຈາກລະດັບ 14 ເຖິງລະດັບ 1.
13.3.ລະດັບໄລຍະທາງ:
ຕາຕະລາງຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນໄລຍະຫ່າງໃນແມັດແລະຕີນສໍາລັບແຕ່ລະລະດັບຂອງຮົ້ວເອເລັກໂຕຣນິກ.
| ລະດັບ | ໄລຍະຫ່າງ (ແມັດ) | ໄລຍະທາງ (ຕີນ) |
| 1 | 8 | 25 |
| 2 | 15 | 50 |
| 3 | 30 | ຮ້ອຍ |
| 4 | 45 | 150 |
| 5 | 60 | 200 |
| 6 | 75 | ກາງ 250 |
| 7 | 90 | 300 |
| 8 | 105 | 350 |
| 9 | ສິບສາມ | 400 |
| 10 | ນາໆ | 450 |
| 11 | 150 | 500 |
| 12 | 240 | 800 |
| 13 | 300 | 1000 |
| 14 | 1050 | 3500 |
ລະດັບໄລຍະຫ່າງທີ່ໃຫ້ແມ່ນອີງໃສ່ການວັດແທກໃນພື້ນທີ່ເປີດແລະມີຈຸດປະສົງເພື່ອຈຸດປະສົງອ້າງອີງເທົ່ານັ້ນ. ເນື່ອງຈາກການປ່ຽນແປງໃນສະພາບແວດລ້ອມອ້ອມຂ້າງ, ໄລຍະຫ່າງທີ່ມີປະສິດຕິຜົນຕົວຈິງອາດຈະແຕກຕ່າງກັນ.
13.4 ການປະຕິບັດງານ preset (ຄວບຄຸມໄລຍະໄກຍັງສາມາດດໍາເນີນງານໄດ້ໃນຮູບແບບທີ່ມີການເຄື່ອນໄຫວ):ກ່ອນທີ່ຈະເຂົ້າໄປໃນຮູບແບບຮົ້ວ, ທ່ານຕ້ອງກໍານົດລະດັບດັ່ງຕໍ່ໄປນີ້:
13.1.1 ສໍາລັບ 1 ຫມາ: ທັງລະດັບການສັ່ນສະເທືອນແລະອາການຊ shock ອກສາມາດກໍານົດໄດ້
13.4.2 ສໍາລັບ 2-4 ຫມາ: ມີພຽງແຕ່ລະດັບການສັ່ນສະເທືອນເທົ່ານັ້ນ, ແລະລະດັບຊ shock ອກບໍ່ສາມາດປັບປ່ຽນໄດ້ (ມັນຍັງຄົງຢູ່ໃນລະດັບ 1 ໂດຍຄ່າເລີ່ມຕົ້ນ).
13.4.3 ຫລັງຈາກຕັ້ງລະດັບການສັ່ນສະເທືອນ, ທ່ານຕ້ອງກົດປຸ່ມ VIRRORRATE ຢູ່ໃນຕົວຄວບຄຸມທີ່ຫ່າງໄກສອກຫຼີກຄັ້ງດຽວເພື່ອບັນທຶກການຕັ້ງຄ່າຮົ້ວດັ່ງກ່າວເຂົ້າໃນຮູບແບບຮົ້ວອີເລັກໂທຣນິກ. ໃນຮູບແບບຮົ້ວເອເລັກໂຕຣນິກ, ທ່ານບໍ່ສາມາດກໍານົດລະດັບການສັ່ນສະເທືອນແລະອາການຊ shock ອກ.
ໃນຂະນະທີ່ຢູ່ໃນຮູບແບບຮົ້ວເອເລັກໂຕຣນິກ, ທ່ານສາມາດໃຊ້ທຸກຫນ້າທີ່ການຝຶກອົບຮົມຂອງຕົວຄວບຄຸມຫ່າງໄກສອກຫຼີກ, ລວມທັງສຽງ, ການສັ່ນສະເທືອນ, ແລະອາການສັ່ນສະເທືອນ. ຫນ້າທີ່ເຫຼົ່ານີ້ຈະສົ່ງຜົນກະທົບຕໍ່ທຸກໆຄໍພາຍໃນຮົ້ວເອເລັກໂຕຣນິກ. ເມື່ອຄວບຄຸມຫມາຫຼາຍໂຕ, ການເຕືອນໄພຊ shock ອກອັດຕະໂນມັດສໍາລັບການທີ່ເກີນຂອບເຂດແມ່ນຖືກປິດໂດຍຄ່າເລີ່ມຕົ້ນ, ແລະລະດັບຄວາມຕົກໃຈໂດຍຄູ່ມືແມ່ນຖືກກໍານົດໃຫ້ເປັນ 1 ໂດຍຄ່າເລີ່ມຕົ້ນ.
| ສະຖານະພາບລະດັບໃນຮູບແບບການແຂ່ງຂັນ / ຮູບແບບການຝຶກອົບຮົມເອເລັກໂຕຣນິກ | ||||
| ຈໍານວນທີ່ຄວບຄຸມ | 1 ຫມາ | 2 ຫມາ | 3 ຫມາ | 4 ຫມາ |
| ລະດັບການສັ່ນສະເທືອນ | ລະດັບກ່ອນກໍານົດ | ລະດັບກ່ອນກໍານົດ (ທຸກໆຫມາແມ່ນຢູ່ໃນລະດັບດຽວກັນ) | ລະດັບກ່ອນກໍານົດ (ທຸກໆຫມາແມ່ນຢູ່ໃນລະດັບດຽວກັນ) | ລະດັບກ່ອນກໍານົດ (ທຸກໆຫມາແມ່ນຢູ່ໃນລະດັບດຽວກັນ) |
| ລະດັບຊ fock ອກ | ລະດັບກ່ອນກໍານົດ | ລະດັບເລີ່ມຕົ້ນ 1 (ບໍ່ສາມາດປ່ຽນແປງໄດ້) | ລະດັບເລີ່ມຕົ້ນ 1 (ບໍ່ສາມາດປ່ຽນແປງໄດ້) | ລະດັບເລີ່ມຕົ້ນ 1 (ບໍ່ສາມາດປ່ຽນແປງໄດ້) |
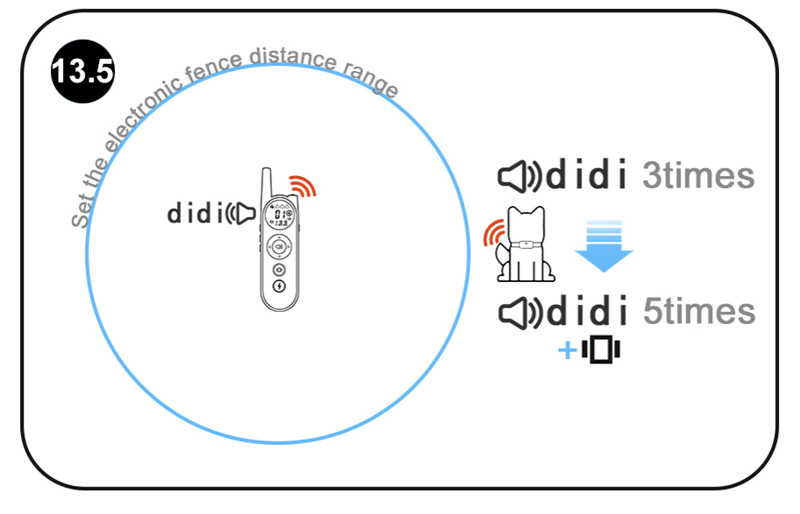
13.5.ຫນ້າທີ່ເຕືອນໂດຍອັດຕະໂນມັດ:
ໃນເວລາທີ່ຄໍໄດ້ເກີນຂີດຈໍາກັດທາງໄກ, ຈະມີການເຕືອນໄພ. ການຄວບຄຸມໄລຍະໄກຈະປ່ອຍສຽງດັງອອກໄປຈົນກ່ວາຫມາຈະກັບຄືນມາສູ່ໄລຍະຫ່າງໄກສອກຫຼີກ. ຖ້າຫມາຍັງບໍ່ກັບມາຈໍາກັດທາງໄກຫຼັງຈາກນີ້, ຄໍຈະປ່ອຍສຽງປິບແລະຄໍາເຕືອນ, ແຕ່ລະໄລຍະ, ຫຼັງຈາກນັ້ນຄໍຈະຢຸດການເຕືອນໄພ. ຫນ້າທີ່ຊ shock ອກຖືກປິດໂດຍຄ່າເລີ່ມຕົ້ນໃນລະຫວ່າງການເຕືອນໄພແບບອັດຕະໂນມັດ. ລະດັບການສັ່ນສະເທືອນໃນຕອນຕົ້ນແມ່ນ 5, ເຊິ່ງສາມາດເປັນ preset.
13.6.Noes:
ເມື່ອເປັນຫມາທີ່ເກີນຂີດຈໍາກັດທາງໄກ, ທັງຫມົດ (3 ສຽງດັງແລະສຽງປັ້ງສຽງປັ້ງດ້ວຍຄວາມຕື່ນເຕັ້ນອີກ 5 ຄັ້ງຖ້າຫມາເກີນຂີດຈໍາກັດທາງໄກ.
- ຫນ້າທີ່ເຕືອນໂດຍອັດຕະໂນມັດບໍ່ປະກອບມີຫນ້າທີ່ຊ shock ອກເພື່ອຮັບປະກັນຄວາມປອດໄພຂອງຫມາ. ຖ້າທ່ານຕ້ອງການໃຊ້ຫນ້າທີ່ຊ shock ອກ, ທ່ານສາມາດປະຕິບັດງານມັນດ້ວຍຕົນເອງໂດຍໃຊ້ການຄວບຄຸມໄລຍະໄກ. ຖ້າຫນ້າທີ່ເຕືອນເຕືອນແບບອັດຕະໂນມັດທີ່ບໍ່ມີປະສິດຕິພາບສໍາລັບການຄວບຄຸມຫມາຫຼາຍໂຕ, ທ່ານສາມາດອອກຈາກຮູບແບບຮົ້ວຂອງເອເລັກໂຕຣນິກແລະເລືອກສຽງທີ່ມີສຽງ / ສັ່ນສະເທືອນ. ຖ້າຄວບຄຸມພຽງແຕ່ຫມາດຽວ, ທ່ານສາມາດປະຕິບັດຫນ້າທີ່ການຝຶກອົບຮົມໂດຍກົງໃນການຄວບຄຸມໄລຍະໄກສໍາລັບການແຈ້ງເຕືອນ.
13.7.TIPs:
- ອອກຈາກຮູບແບບຮົ້ວເອເລັກໂຕຣນິກໃນເວລາທີ່ບໍ່ໃຊ້ໃນການປະຫຍັດແບັດເຕີຣີ.
- ມັນແນະນໍາໃຫ້ໃຊ້ຟັງຊັນການສັ່ນສະເທືອນກ່ອນອື່ນກ່ອນທີ່ຈະໃຊ້ຟັງຊັນອາການຊ shock ອກໃນລະຫວ່າງການຝຶກອົບຮົມ.
ເມື່ອໃຊ້ຫນ້າທີ່ກ່ຽວກັບຮົ້ວເອເລັກໂຕຣນິກ, ໃຫ້ແນ່ໃຈວ່າຄໍຖືກເຫມາະສົມກັບຫມາຂອງທ່ານຢ່າງຖືກຕ້ອງ.
ເວລາໄປສະນີ: Oct-20-2023





